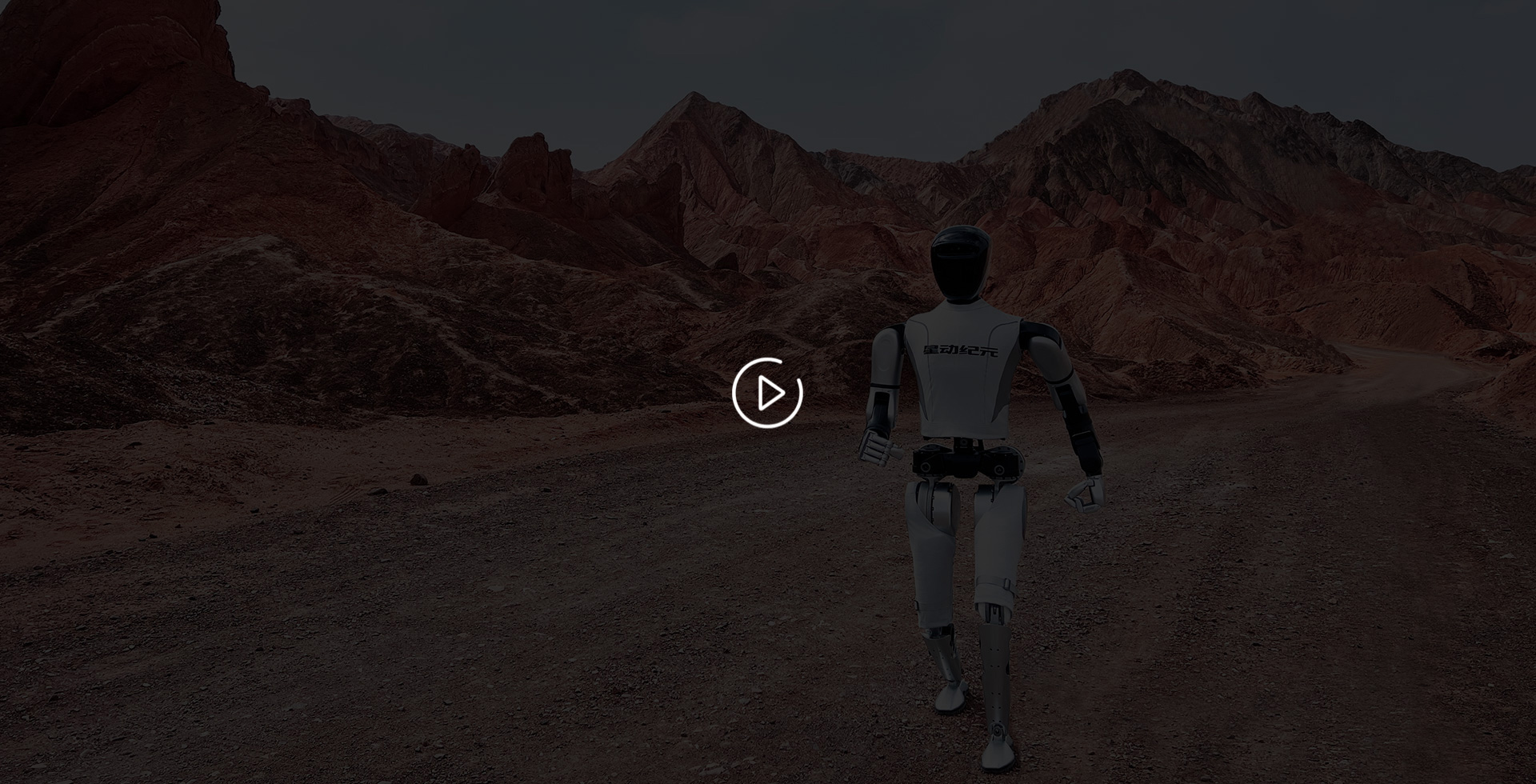
星动STAR1
高性能通用人形机器人

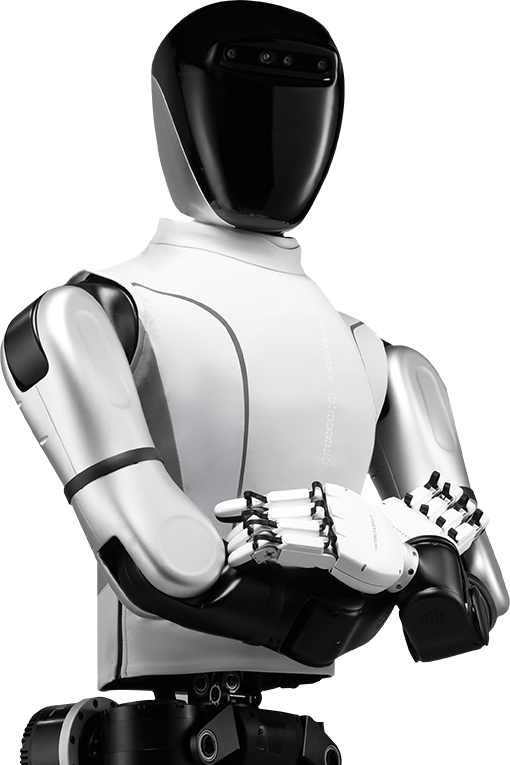


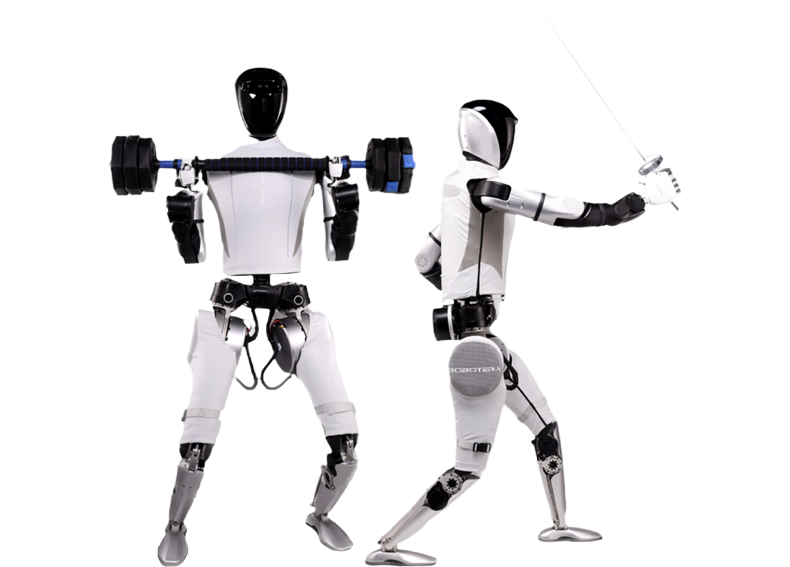
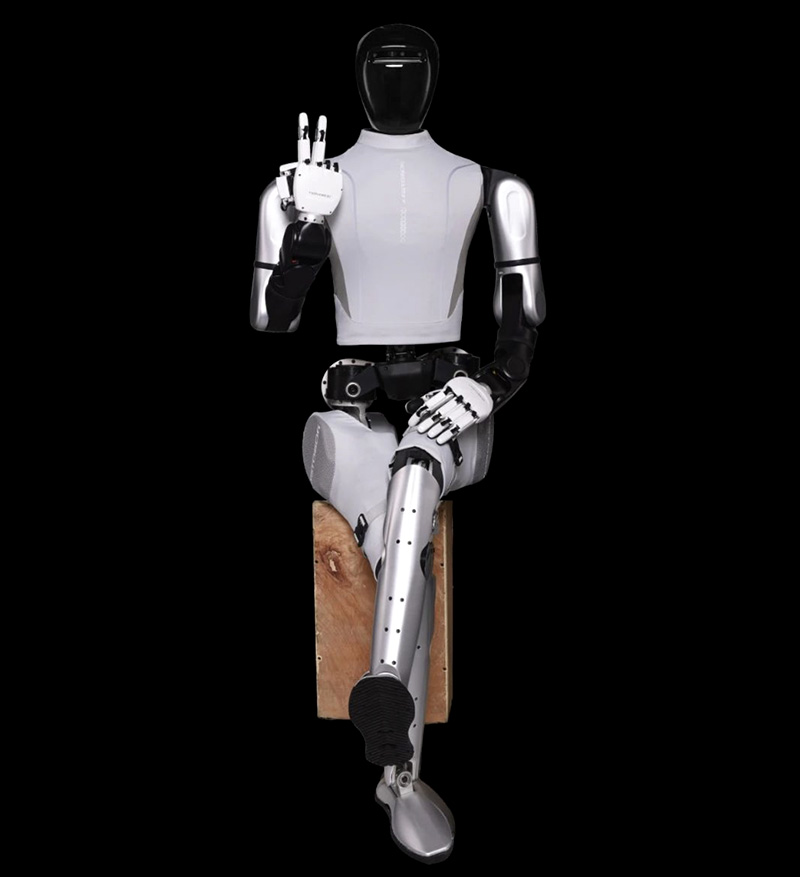
星动STAR1是星动纪元首款产品级高性能通用人形机器人,共有55个自由度。最高关节扭矩达400Nm,最高转速达25rad/s。这使得星动STAR1具备了业界先进的动态性能,室外真实场景奔跑速度达3.6m/s,配合腰部3个自由度能轻松完成自然步态下的稳定行走、奔跑、跳跃等复杂运动。
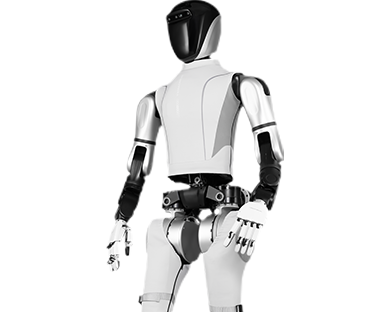
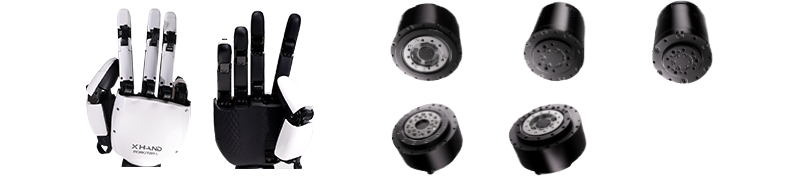
星动STAR1上肢包括自主研发的配备7个自由度高精度仿生机械臂,以及12个全主动自由度的高性能灵巧手星动XHAND1,使得星动STAR1在精细操作任务领域具备业界先进的执行机构,能适应多种场景应用需求。







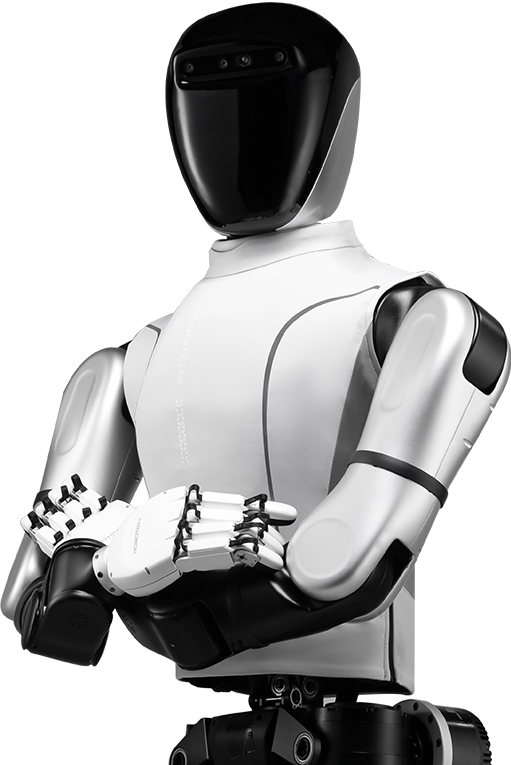
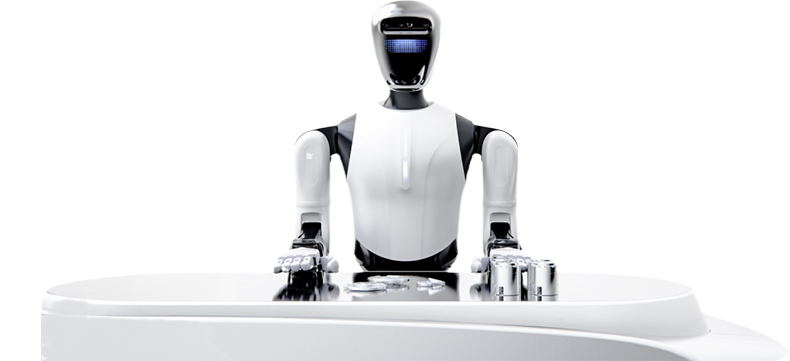
星动STAR1集成了Intel高性能处理器和NvidiaOrin强大的计算资源,为人形机器人在强化学习、模仿学习和端到端大模型研究中提供了卓越的算力支持。机器人还配备了指尖阵列式触觉传感器、深度视觉相机、麦克风阵列和面部交互屏幕等多种外设,完善的软件和遥操作系统,方便高效训练和高度自主化操作。
星动STAR1是人工智能与机器人硬件深度融合的杰出代表,专为应对当今和未来的科研挑战而设计,具备卓越的性能与灵活性。














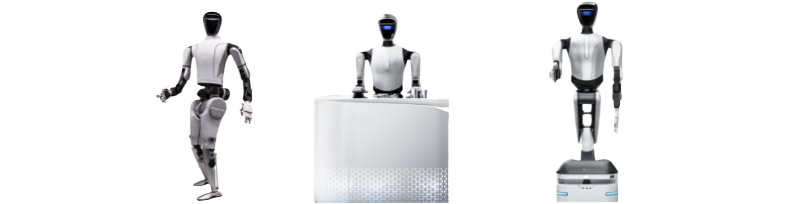
星动STAR 1已经在移动与操作中采用端到端纯学习方法,仅依靠一个神经网络实现了机器人在不同环境中的泛化行走和抓取。其前沿的语言-视觉-动作大模型通过语言和视觉信号直接生成动作,避免了信息传递损耗,并支持更高效的Scale-Up。经过大量数据训练,模型具备了卓越的泛化能力,使机器人能在新任务场景中仅用少量数据即掌握新技能,展现出优异的自适应能力与扩展性。
智能体的交互依托于物理载体,而人类形态是目前通用智能的最佳实例。基于此,星动纪元设计了软硬一体、为AI量身打造的全新人形机器人硬件架构。从底层电机到双足系统和灵巧手,所有部件均实现了AI友好。确保算法能在硬件上快速验证,大幅提升Sim2Real效率,实现软硬件的协同进化。











 关注公众号
关注公众号 关注视频号
关注视频号