STAR1
High-Performance General-Purpose Humanoid Robot

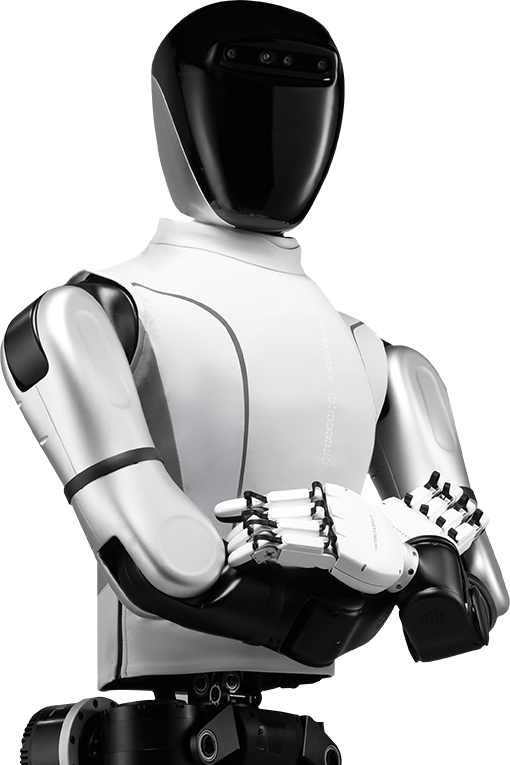
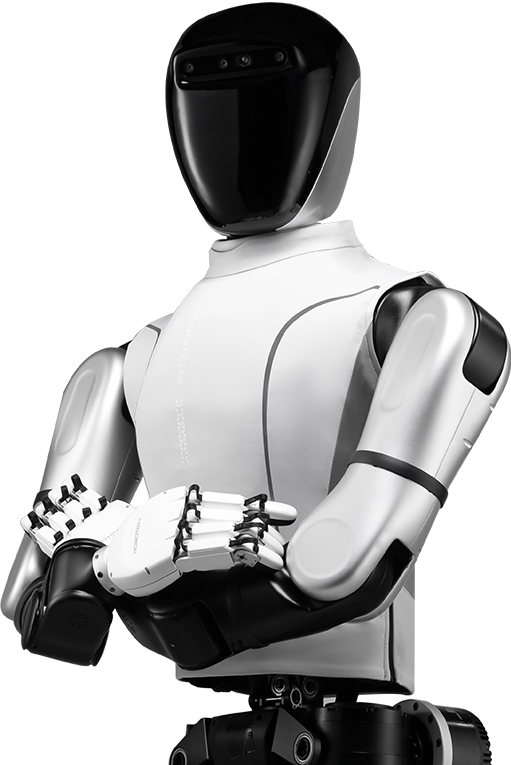


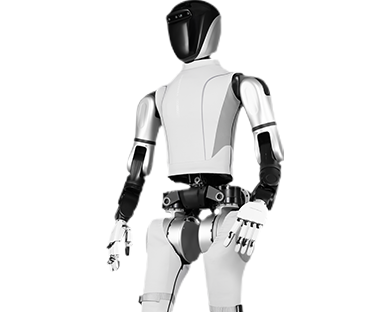
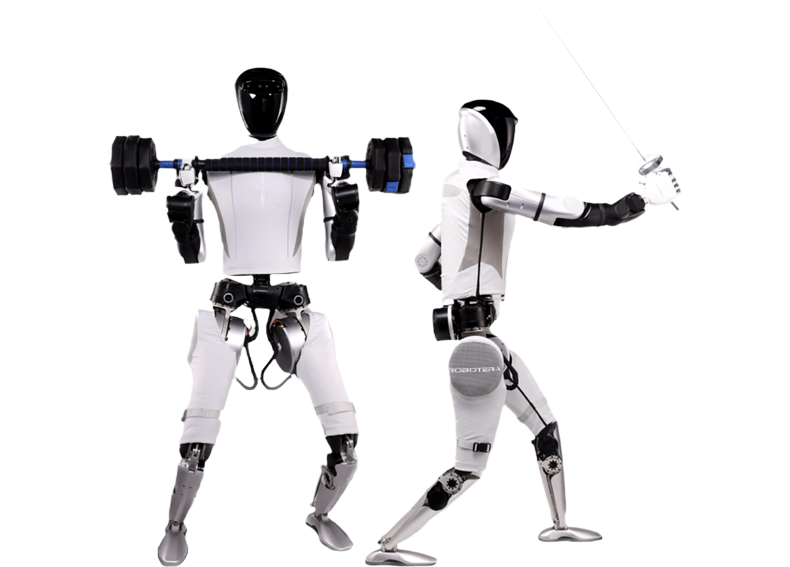
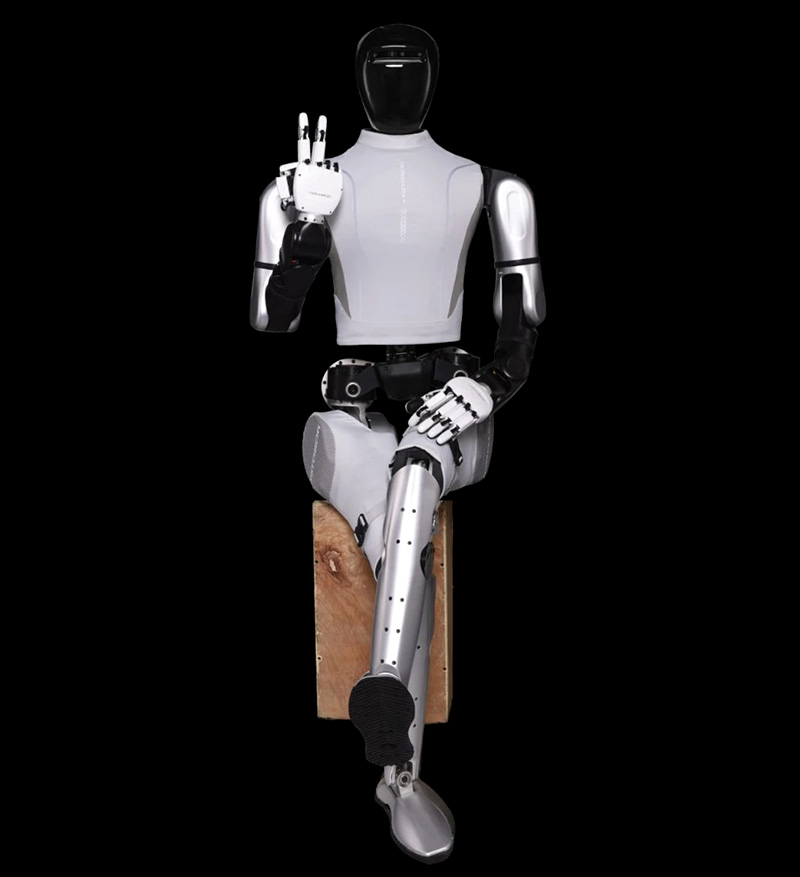
STAR1 is the first product-level high-performance humanoid robot from ROBOTERA, featuring 55 degrees of freedom (DOF). The maximum joint torque reaches 400Nm, and it also has high-speed performance, with a maximum speed up to 25rad/s. This makes STAR1 have the most advanced dynamic performance in the industry, outdoor actual scene running speed up to 3.6m/s, and with the 3 DOF waist, it can easily complete stable walking, running, jumping, and other complex movements in a natural gait.

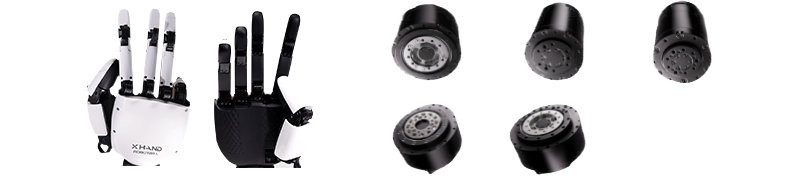
The STAR1 includes self-developed 7-DOF high-precision bionic mechanical arms, as well as 12 fully active DOF high-performance dexterous hands (XHAND1), making it the most advanced execution body in the industry for fine operation tasks and adaptable to a variety of application needs.







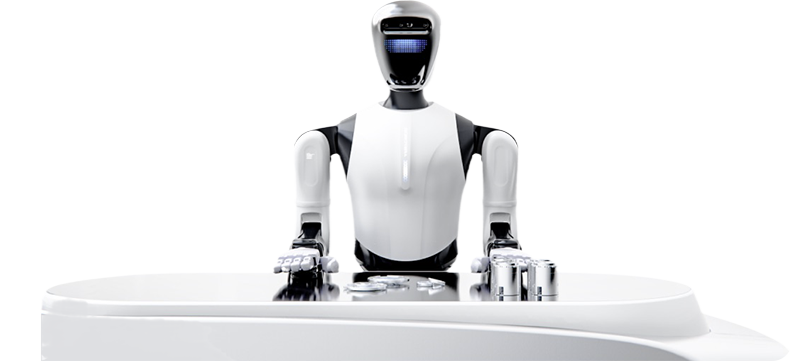
STAR1 integrates Intel’s high-performance processors and Nvidia Orin’s advanced computing platform, delivering exceptional computational support for humanoid robots in reinforcement learning, imitation learning, and end-to-end large model research. Additionally, the robot is equipped with various peripherals, including fingertip array tactile sensors, depth vision cameras, microphone arrays, and facial interaction screens. Combined with comprehensive software and remote operating systems, STAR1 ensures convenient and efficient training, as well as highly autonomous operation.


























 Follow the Official Account
Follow the Official Account Follow the Video Channel
Follow the Video Channel