STAR1
High-Performance General-Purpose Humanoid Robot



High power density
Coreless motor

Low damping and small gap
Reducer

High power density actuator
High power density actuator



* The data is derived from Starlight Labs test results, which are based on Starlight XHAND1 grip and load capacity tests.
Actual data may vary due to use of environmental conditions, and different test settings.
Increased independent degrees of freedom
Increase control precision
Fully open underlying controls for high playability
Reduce Sim2Real
Tactile sensing
Imitation learning
Supports current loop force control, low damping, and high linearity.
Force Control with Haptic Sensor Feedback




1100 g
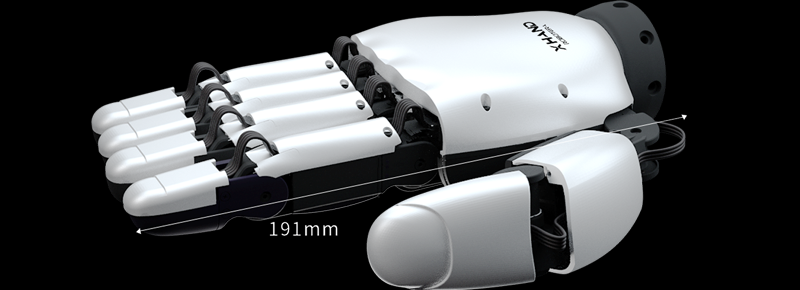
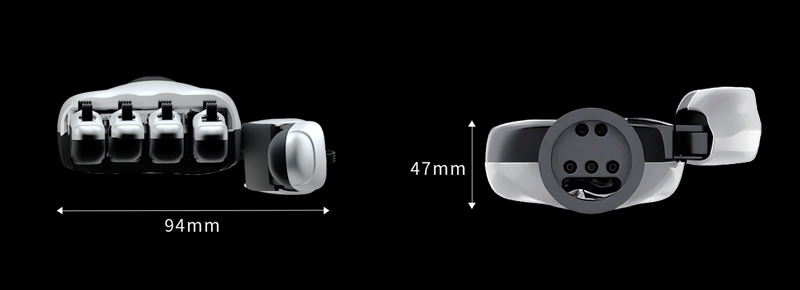
191 mm x 94 mm x 47 mm(The size of an adult’s hand)
12
0
Thumb x 3 Index Finger x 3 Middle Finger x 2 Ring Finger x 2 Little Finger x 2
3 gear-driven force-controlled joint module
9 gear-driven force-controlled joint module
Round or Rounded Fingertips
-15°~+15°(Index)
±0.20 mm
Position control (low damping/high damping mode), current-loop force control, force-position control
15 N
80 N
16 Kg
25 Kg
Little Pinky
>2Hz
≤0.1 Nm
270° five-finger fingertip encirclement
Five 270° three-dimensional encircling tactile array sensors on five fingertips
12x10 (270° encircling per fingertip) x 5
Three-dimensional force sensing (Including tangential forces X and Y)
83Hz
EtherCAT:100MHz RS485:3MHz
Transmitter: 2088–4896 bytes Teceiver: 288 bytes
Fingertips: 120 three-dimensional profiling array forces Joints: position, velocity, temperature, current (torque)
Joint position, joint torque, joint stiffness coefficient, joint damping coefficient
1,000,000 cycles
-20°C ~ 60°C
24V ~ 72V
0.15A @48V, 7W
2.5A@48V,120W
RS485(USB), EtherCAT
【1】The data is measured when the dexterous hand is placed flat. 【2】 The data is measured under load.
1100g
191±1(mm)
94±1(mm)
47±1(mm)
12
0
Thumb x 3
Index Finger x 3
Middle Finger x 2
Ring Finger x 2
Little Finger x 2
gear-driven force-controlled joint module
gear-driven force-controlled joint module
Thumb joints:
Thumb joint 0: 0°90°
Thumb joint 1: -60°90°Thumb joint 2: 0°90°
Four-finger joints:
Four-finger joint 0: 0°110°
Four-finger joint 1: 0°~110°
-15~+15(Index)
16mm
2mm
24V-72V
0.15A @48V, 7W
2.5A@48V,120W
RS485(USB), EtherCAT
15N
8Kg
Little Pinky
>2Hz
0.1Nm
fingertip
5
120x5 (five fingers)
Three-dimensional (including tangential XY forces)
83Hz
Ethercat:100MHz
RS485:3MHz
Up: 2088~4896 bytes
Down: 288 bytes
Fingertips: 120 Three-dimensional profiling array
ForcesJoints: position, velocity, temperature, current (torque)
joint position, joint torque, joint stiffness coefficient, joint damping coefficient
position control (low damping/high damping mode), current-loop force control, force-position control
1,000,000 cycles
-20℃ ~ 60℃
[1] 该数据为灵巧手平放状态下尺寸。
[2] 该数据为灵巧手受垂直朝下的直径为1cm的圆柱压迫时所受到的压力,在不同应用场景中有所差异,请以实际为准。
[3] 以上参数,在不同业务场景、不同型号参数配置等情况,在应用中有所差异,请以实际为准。
[4] 产品外观后续可能会有升级调整,请以届时实物为准。
[5] 本产品为民用机器人产品,请各位用户不要危险性改造和使用机器人。

Provide professional solutions for disabled people who have

Increase intimacy and ergonomics










 Follow the Official Account
Follow the Official Account Follow the Video Channel
Follow the Video Channel