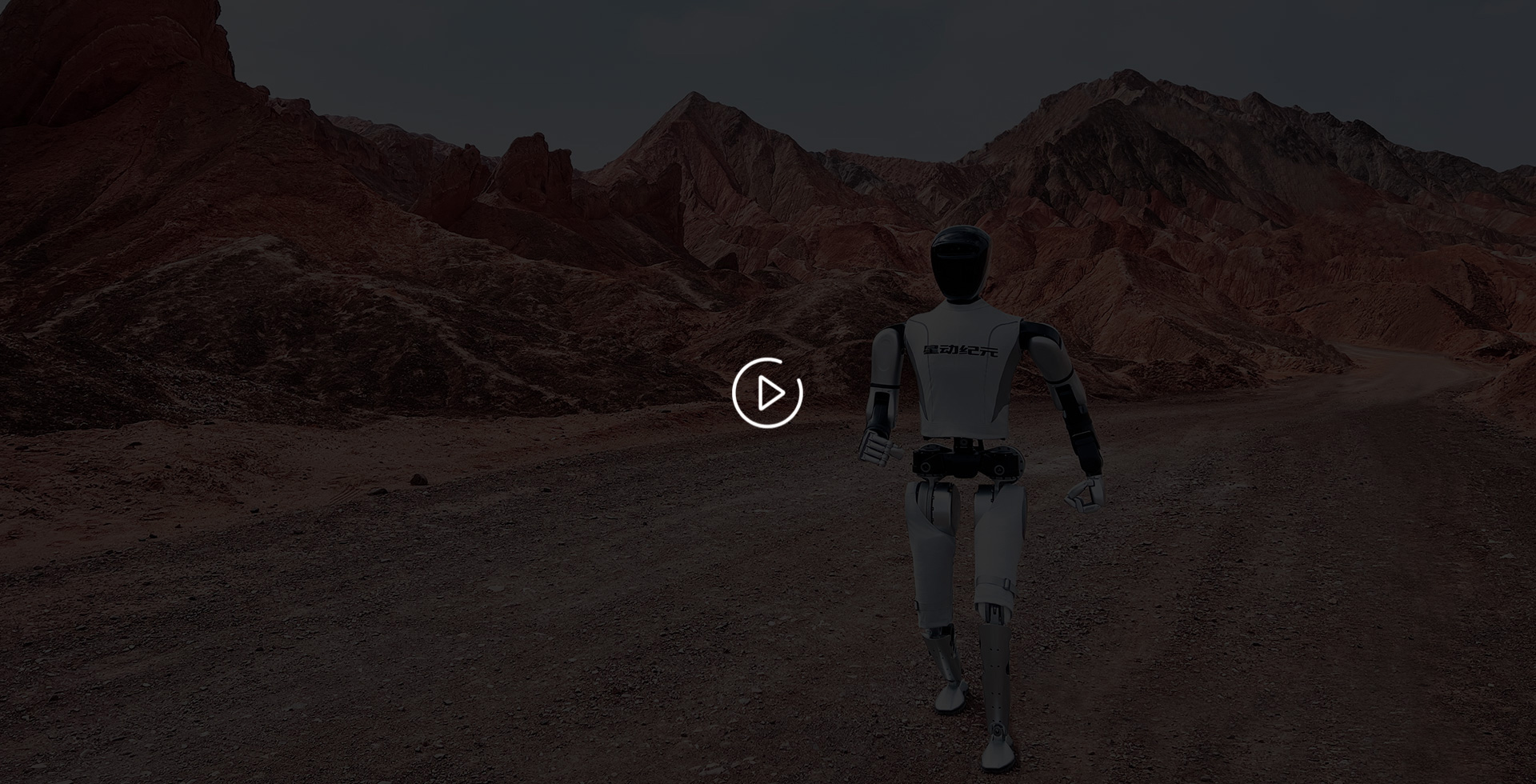
STAR1
High-Performance General-Purpose Humanoid Robot

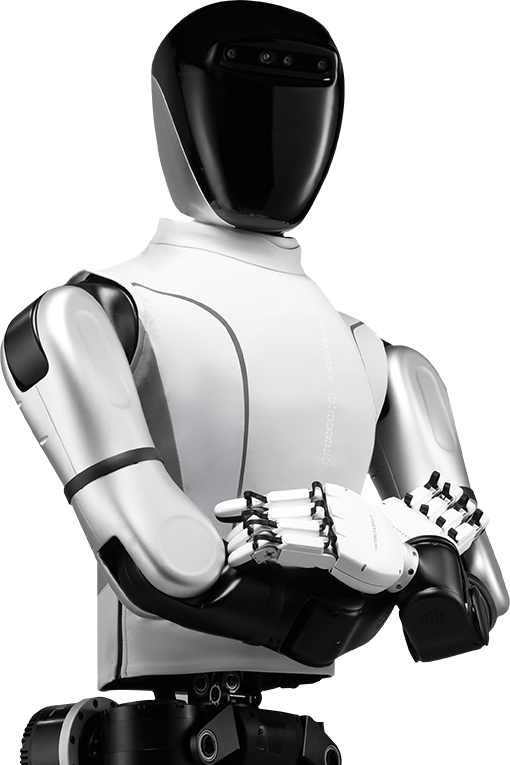
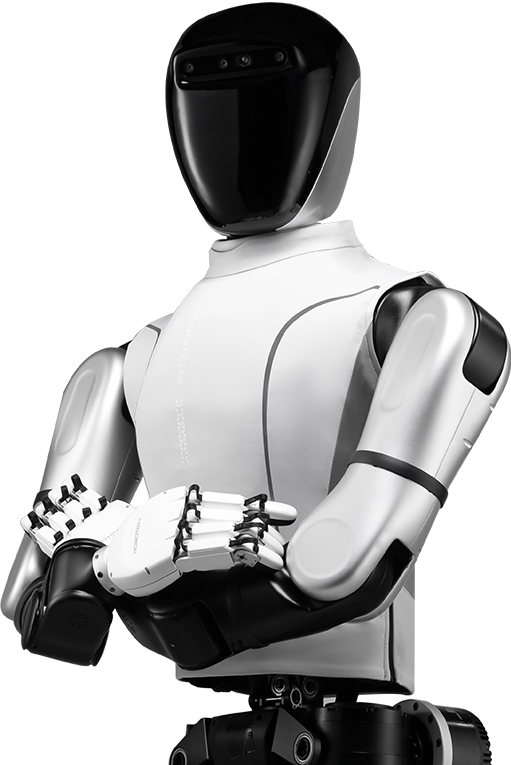


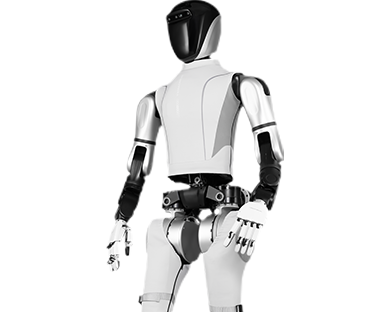
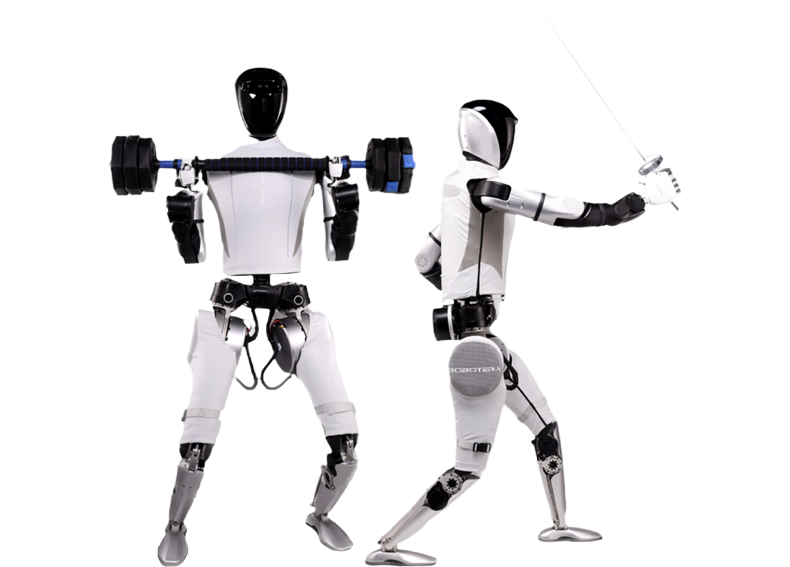
STAR1 is the first product-level high-performance humanoid robot from Robot Era, featuring 55 degrees of freedom (DOF). The maximum joint torque reaches 400Nm, and it also has high-speed performance, with a maximum speed up to 25rad/s. This makes STAR1 have the most advanced dynamic performance in the industry, outdoor actual scene running speed up to 3.6m/s, and with the 3 DOF waist, it can easily complete stable walking, running, jumping, and other complex movements in a natural gait.
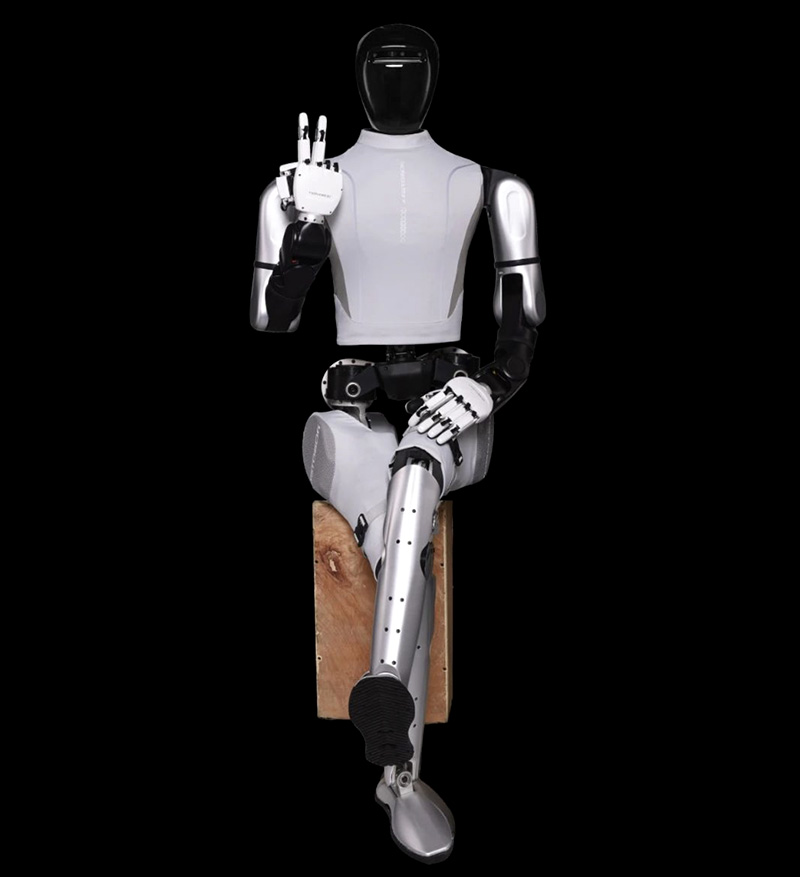
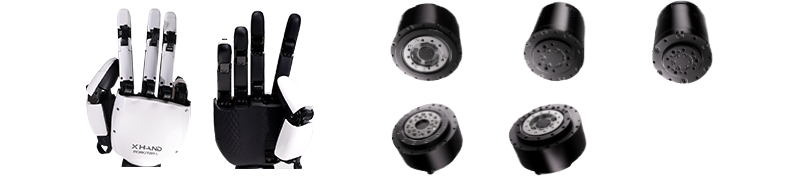
The upper limbs of STAR1 include self-developed 7 DOF high-precision bionic mechanical arms, as well as 12 fully active DOF high-performance dexterous hands XHAND1, making STAR1 the most advanced executive body in the field of fine operation tasks in the industry, adaptable to a variety of application needs.
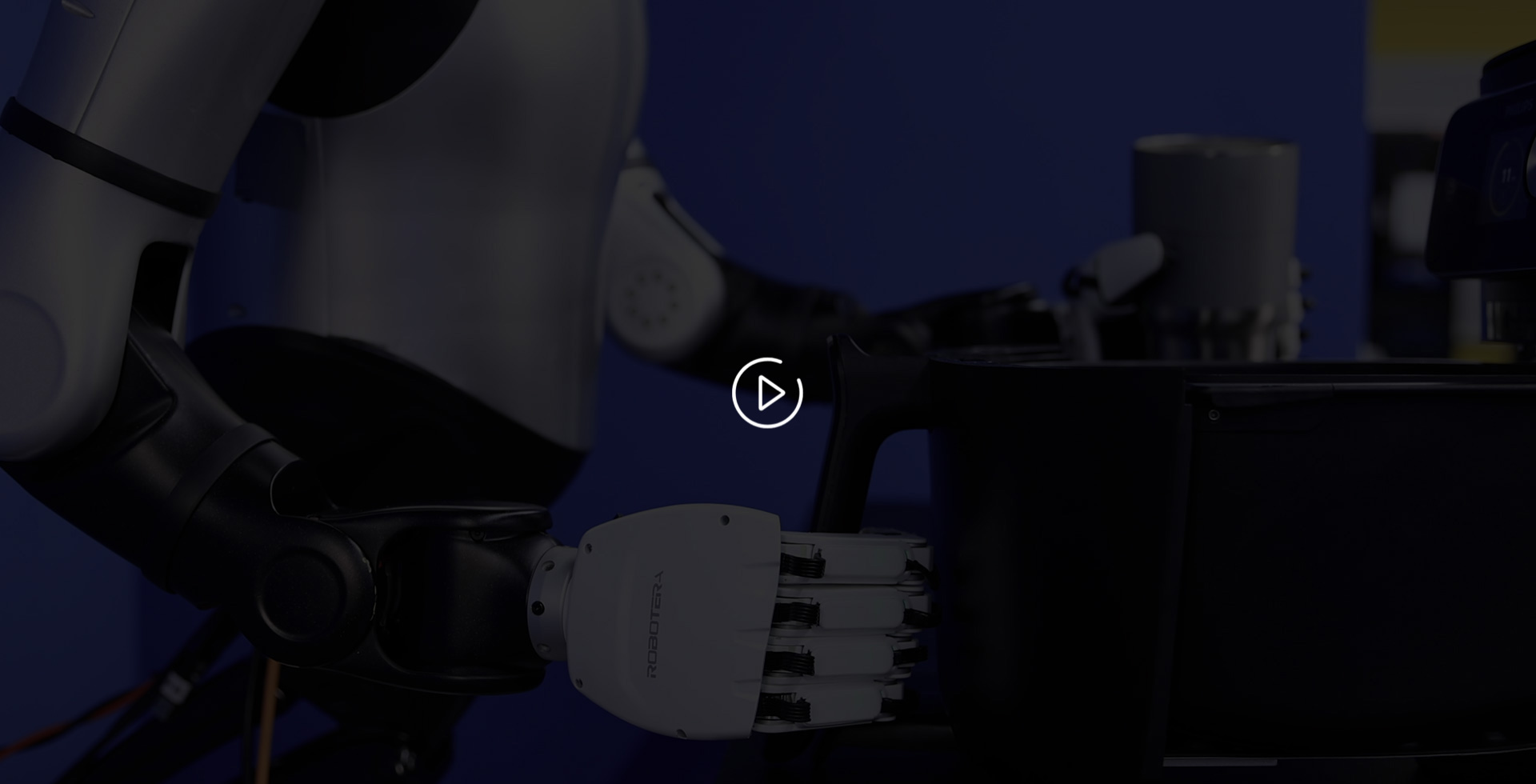






STAR1 is integrated with Intel's high-performance processors and Nvidia Orin's advanced computing platform, providing excellent computing support for humanoid robots in reinforcement learning, imitation learning, and end-to-end large model research. The robot is also equipped with a variety of peripherals such as fingertip array tactile sensors, depth vision cameras, microphone arrays, and facial interaction screens, as well as comprehensive software and remote operating systems, making it convenient and efficient for training and highly autonomous operation.














STAR 1 has already adopted an end-to-end pure learning method in movement and operation, relying solely on a neural network to achieve generalized walking and grasping in different environments. Its cutting-edge language-vision-action large model generates actions directly from language and visual signals, avoiding information transmission loss and supporting more efficient scaling-up. After extensive data training, the model has developed excellent generalization capabilities, allowing the robot to master new skills with minimal data in new task scenarios, demonstrating superior adaptability and extensibility.











 Follow the Official Account
Follow the Official Account Follow the Video Channel
Follow the Video Channel