星动L7
全尺寸 双足人形机器人(新一代)




高功率密度
空心杯电机

低阻尼小间隙
减速器

高功率密度驱动器
与高精度编码器




* 数据来源于星动实验室测试结果,测试结果基于星动XHAND1握力和负载能力测试
实际数据可能会因使用环境条件,测试设置不同存在差异。

增加独立自由度
增加控制精度
全面开放底层控制,具有很强的可玩性
减小Sim2Real
触觉传感
触觉传感
支持电流环力控,低阻尼,高线性度;
触觉传感反馈的力控




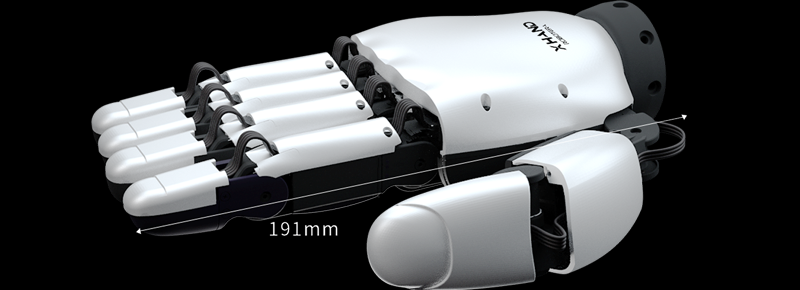
1100 g
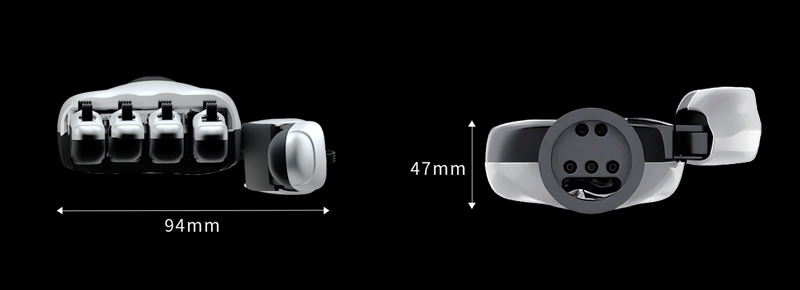
191 mm x 94 mm x 47 mm (相当于成人人手大小)
12
0
拇指 x 3 食指 x 3 中指 x 2 无名指 x 2 小拇指 x 2
3个自研齿轮传动力控关节模组
9个自研齿轮传动力控关节模组
圆润型指尖
-15°~+15°(食指)
±0.20 mm
位控(低阻尼/高阻尼模式)、电流环力控、力位控制
15 N
80 N
16 Kg
25 Kg
小拇指
>2Hz
≤0.1 Nm
270°五指指尖环绕
5个 (五指指尖270°三维环绕触觉阵列传感)
12x10(单指尖270°环绕)x5
三维力感知(包含切向力XY)
83Hz
EtherCAT:100MHz RS485:3MHz
发送端:2088~4896 bytes 接收端:288 bytes
指尖:12x10(单指尖)x5触觉三维阵列传感器 关节:位置,速度,温度,电流(力矩)
关节位置、关节扭矩、关节刚度系数、关节阻尼系数
100万次
-20℃ ~ 60℃
24V ~ 72V
0.15A @48V, 7W
2.5A@48V,120W
RS485(USB), EtherCAT
【1】该数据为灵巧手平放状态下测量的尺寸 【2】该数据为负载状态下测量的数据
1100g
191±1(mm)
94±1(mm)
47±1(mm)
12
0
Thumb x 3
Index Finger x 3
Middle Finger x 2
Ring Finger x 2
Little Finger x 2
gear-driven force-controlled joint module
gear-driven force-controlled joint module
Thumb joints:
Thumb joint 0: 0°90°
Thumb joint 1: -60°90°Thumb joint 2: 0°90°
Four-finger joints:
Four-finger joint 0: 0°110°
Four-finger joint 1: 0°~110°
-15~+15(Index)
16mm
2mm
24V-72V
0.15A @48V, 7W
2.5A@48V,120W
RS485(USB), EtherCAT
15N
8Kg
Little Pinky
>2Hz
0.1Nm
fingertip
5
120x5 (five fingers)
Three-dimensional (including tangential XY forces)
83Hz
Ethercat:100MHz
RS485:3MHz
Up: 2088~4896 bytes
Down: 288 bytes
Fingertips: 120 Three-dimensional profiling array
ForcesJoints: position, velocity, temperature, current (torque)
joint position, joint torque, joint stiffness coefficient, joint damping coefficient
position control (low damping/high damping mode), current-loop force control, force-position control
1,000,000 cycles
-20℃ ~ 60℃
[1] 该数据为灵巧手平放状态下尺寸。
[2] 该数据为灵巧手受垂直朝下的直径为1cm的圆柱压迫时所受到的压力,在不同应用场景中有所差异,请以实际为准。
[3] 以上参数,在不同业务场景、不同型号参数配置等情况,在应用中有所差异,请以实际为准。
[4] 产品外观后续可能会有升级调整,请以届时实物为准。
[5] 本产品为民用机器人产品,请各位用户不要危险性改造和使用机器人。

为生活不便的残疾人提供专业解决方案

增加亲切感,更符合人体工程系

400 900 8798










 关注公众号
关注公众号 关注视频号
关注视频号